AI Robot Dog
This is the product description of the WAVEGO Pro bionic quadruped robotic dog. The core information and expanded interpretation are as follows:
Core positioning
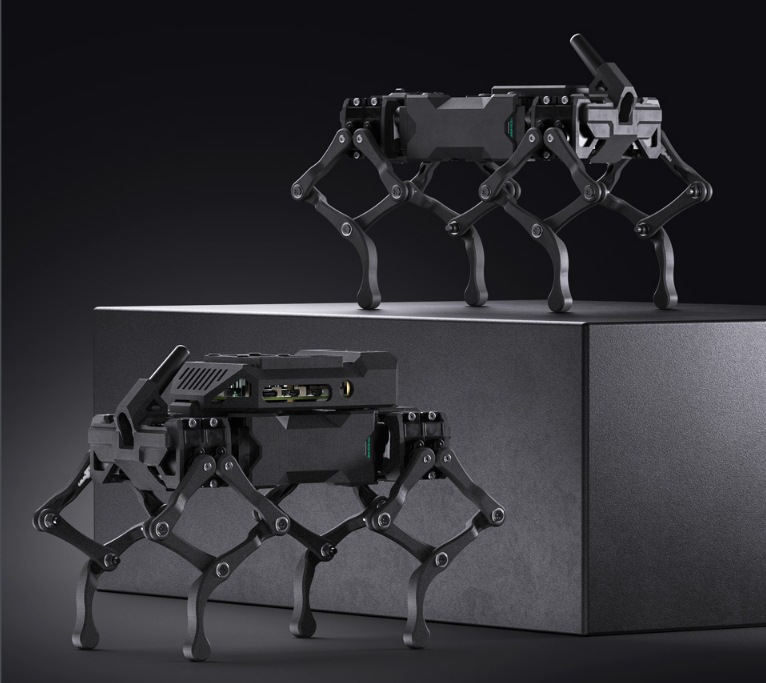
A high degree of freedom open-source quadruped robot that focuses on educational display, secondary development, and functional demonstration, with both hardware scalability and software openness.
Key configurations and functions
1. Hardware architecture
-Lower computer: ESP32 (responsible for link inverse solution, gait generation, and sharing computing power)
-Host computer: Supports Raspberry Pi 4B/5 (responsible for high-level decision-making, such as visual computing)
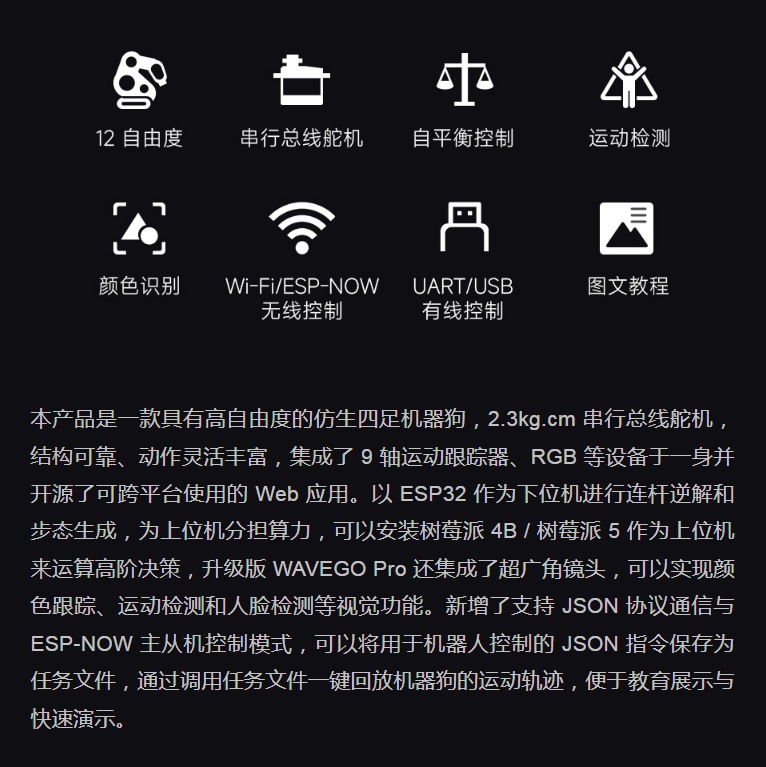
-Drive: 2.3kg ・ cm serial bus servo, equipped with 12 degrees of freedom, flexible action
-Sensor: Integrated 9-axis motion tracker, ultra wide angle lens
-Structure: Made of aluminum alloy and nylon material, balancing lightweight and strength
2. Core functions
-Visual ability: achieve color tracking, motion detection, and face detection through ultra wide angle lenses
-Control mode: Supports JSON protocol communication, ESP-NOW master-slave mode, can save control instructions as task files, and one click playback of motion trajectories
-Interaction: Open source cross platform web application (no need to install an app, can be controlled through a browser)
3. Scalability
-Reserved extension interface, supporting secondary development (such as external devices, custom algorithms)
-Raspberry Pi can be combined with OpenCV to achieve more complex visual functions
Application scenarios
Mainly used for educational demonstrations, robot development learning, functional prototype verification, and can also be used as an open-source hardware platform for custom functional development
Comparison Table of Core Parameters for WAVEGO Pro Bionic Four legged Robot Dog.




| Brand Name | AI Robot Dog |
| Model Number | ARD-888 |
| Core control | Lower computer ESP32 chip, upper computer supports Raspberry Pi 4B/5 |
| Drive system | Servo type 2.3kg ・ cm serial bus servo with 12 degrees of freedom |
| Perception system | Motion sensor 9-axis motion tracker, vision module ultra wide angle lens |
| Communication method | Transmission protocol JSON protocol, ESP-NOW master-slave mode, open source cross platform web application control interface |
| Structural design | Material: Aluminum alloy+Nylon |
| Development support | Secondary development of open-source hardware+extensible interface, instruction storage supports task file saving |
| Zise | 180*71 |
| Place of Origin | China |
| Series | |||
|---|---|---|---|

|
Raspberry Pi 5 WAVEGO PRO 12 Degrees of Freedom Bionic Four legged Intelligent Robot Dog | ||

|
Raspberry Pi 5 WAVEGO PRO 12 Degrees of Freedom Bionic Four legged Intelligent Robot Dog | ||
|
|
Raspberry Pi 5 WAVEGO PRO 12 Degrees of Freedom Bionic Four legged Intelligent Robot Dog |
| Option | Part Number | ||
|---|---|---|---|
|
|
White Light, Black Housing - Spread | 2LT 980 740-001 | |
|
|
White Light, White Housing - Spread | 2LT 980 740-011 | |
|
|
White Light, Black Housing - Spot | 2LT 980 740-201 | |
|
|
White Light, White Housing - Spot | 2LT 980 740-211 |
| Housing description | ‘Non metal’ thermally conductive polymer housing |
| Lens material | Grilamid |
| Bracket | Polished 316 stainless steel |
| Colour temperature | 5000K (White) |
| Cable | Pre-wired with 2.5m of triple core marine cable |
| Operating Voltage | Multivolt? 9-33V DC |
| Degree of Protection | IP 67 - Completely Sealed |
| High Power Consumption | 18W (<1.5A@12V / <0.75A@24V) |
| Low Power Consumption | 2W (<0.17A@12V / <0.08A@24V) |
| Weight | 450g (including cable) |
| Light Output | 1500 lumens (White) |
| Approvals | CE, RCM |
| Manufactured in | New Zealand |